Lotus 2.0
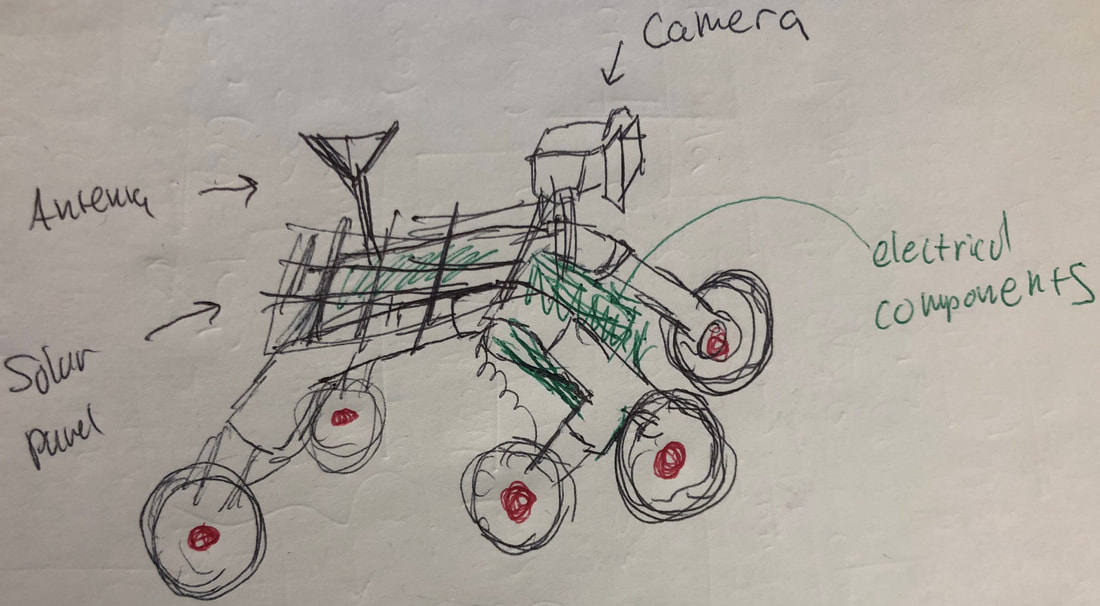
The lotus 2.0 is a partially autonomous rover that will roam Salton Sea to take data measurements using a number of sensors, including temperature, humidity, and object detection. The user will have control over the target destination while the rover takes measurements as it locates to the desired destination. It will be battery-powered, which will be charged through a solar panel. The user will also be able to monitor the rover's power consumption to make the best use of its run-time before it has to charge up.
Lotus 2.0 Rough Sketch
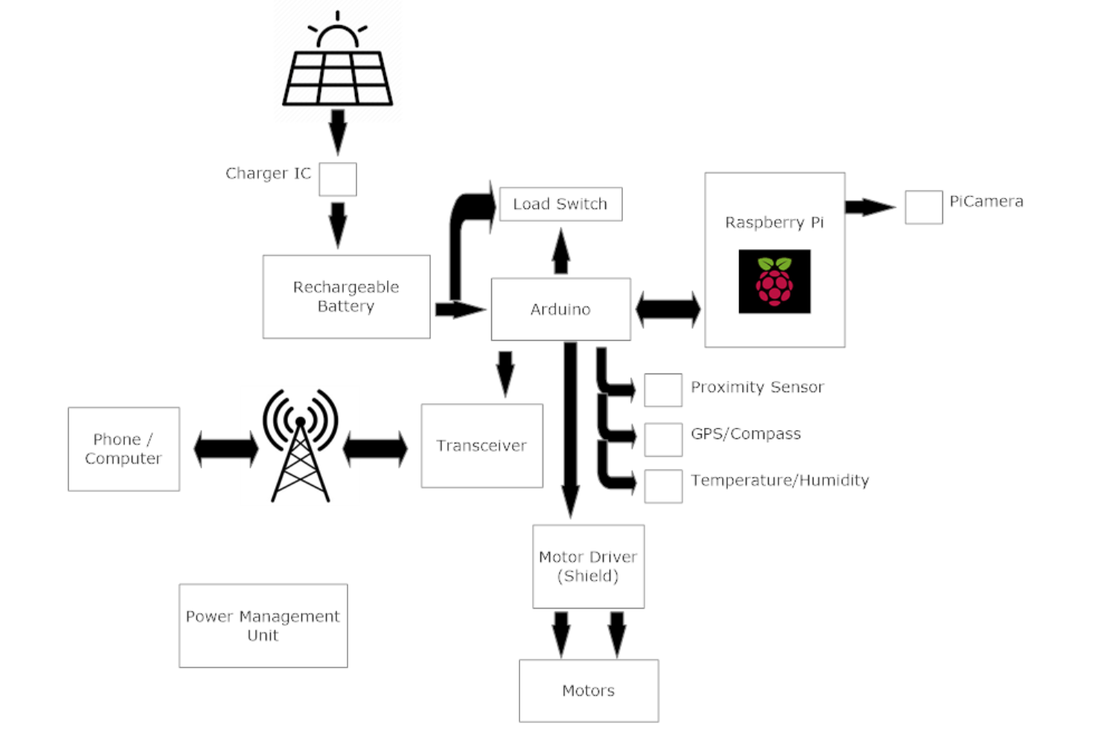
Block Diagram
Prototype


Components
- PVC pipes
- 6 ft | 3/4"
- 90-degree PVC Elbow
- Quantity: 2 pcs | 3/4"
- 45-degree PVC Elbow
- Quantity: 2 pcs | 3/4"
- Stainless Steel Hose Clamp
- Quantity: 6 pcs | 25 mm
- CHIHAI Motor 12V DC Geared Motor
- Quantity: 6 pcs | 80 RPM
- Hexagonal Copper Coupling
- Quantity: 6 pcs | 12 mm
- Wheel Rim & Tires HSP 1:10 Monster Truck RC Car
- Quantity: 6 pcs | 12 mm Hub
- Arduino Mega 2560 MCU
- Quantity: 2 pc
- Raspberry Pi 4 Model B
- Quantity: 1 pc
- Cytron 10A 5-30V Dual Channel DC Motor Driver
- Quantity: 1 pc
- NEO6 u-blox 6 GPS Module
- Quantity: 1 pc
- MPU-9250 Compass Module
- Quantity: 1 pc
- Ultrasonic Ranging Module HC - SR04
- Quantity: 1 pc
- DHT 11 Humidity & Temperature Sensor
- Quantity: 1 pc
- Camera Module V2
- Quantity: 1 pc
- MakerFocus Raspberry Pi Servo Motor Kit
- Quantity: 1 pc
- Reyax RYLR896
- Quantity: 2 pc
- Copper Clad Board for Antenna Design
- Quantity: 1 pc | 1/16", 1.6 mm
- ExpertPower EXP-1270
- Quantity: 1 pc
- Waterproof Solar Sealed Lead Acid Battery ChargerUV87511
- Quantity: 1 pc
- MOHOO 20 Charge Controller
- Quantity: 1 pc
- MAX34407 Evaluation Kit
- Quantity: 1 pc
